17.3. ПРИВОДЫ И МЕХАНИЗМЫ УНИВЕРСАЛЬНЫХ И УСТАНОВОЧНЫМ АВТОМАТОВ
а) Приводы. Привод должен обеспечить усилие на контактах, необходимое для включения автомата в самом тяжелом случае — на существующее КЗ.
Приводы могут быть ручные и электромеханические. Ручные приводы применяются при номинальных токах до 200 А. При токах до 1 кА применяются электромагнитные приводы, обеспечивающие необходимую скорость нарастания давления в контактах. Недостатками электромагнитного привода являются большие скорости движения и удары в механизме, которые могут приводить к вибрации контактов.
Обычно электромагнитный привод автомата питается от той же сети, что и нагрузка. Напряжение на приводе в момент включения на существующее КЗ падает до нуля, и автомат может не включиться. В приводе независимого действия энергия, необходимая для включения, накапливается в заведенной пружине. После подачи команды на включение освобождается удерживающая защелка пружины и автомат включается при любых напряжениях сети. При ручном включении привод независимого действия можно получить, если использовать принцип прыгающего контакта (рис. 9.13).
В автоматах на токи 1500 А и выше желательно применение электродвигательного привода. Электродвигатель соединен с автоматом через понижающую зубчатую передачу. Даже при потере напряжения кинетической энергии, накопленной в быстровращающемся роторе двигателя, бывает достаточно, чтобы закончить процесс включения. Достоинствами этого привода являются плавный ход механизма и отсутствие ударов.
б) Механизм передачи усилия от привода к контактам выполняет следующие функции: передает движение от привода к контактам и удерживает их во включенном положении, освобождает контакты при отключении автомата, сообщает контактам скорость, необходимую для гашения дуги, фиксирует контакты в отключенном положении и подготавливает автомат для нового включения.
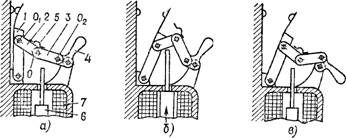
Рис 17.3. Механизм простейшего автомата
Ввиду специфичности быстродействующих автоматов здесь рассматриваются только механизмы установочных п универсальных автоматов. На рис. 17.3 показан простейший механизм для автоматов с током до 1000 А.
При отсутствии аварийной ситуации звенья 2 и 3 составляют один жесткий рычаг, так как центр шарнира О, соединяющего эти звенья, лежит ниже прямой, соединяют точки Oi и 02, а упор 5 не дает возможности сложиться этим звеньям (рис. 17.3, а).
При включении на КЗ по обмотке электромагнита 7 начинает протекать большой ток. Якорь 6 втягивается в обмотку и ломает рычаг, как это показано на рис. 17.3, б. Рукоятка 4 и контактный рычаг / оказываются расцепленными. Под действием отключающей пружины, не показанной на рисунке, плоской контактной пружины и массы подвижных частей контакты размыкаются и происходит отключение автомата. Рукоятка привода может вращаться против часовой стрелки, не оказывая воздействия на состояние контактов. Для подготовки к новому включению необходимо повернуть рукоятку 4 до отказа по часовой стрелке. Звенья 2 и 3 сложатся и при обесточенном электромагните снова составят жесткий рычаг (рис. 17.3,б). Недостатком механизма является относительно большое усилие расцепления, так как при этом необходимо деформировать контактную пружину. С ростом номинального тока растет нажатие контактных пружин, а следовательно, и усилие, необходимое для расцепления автомата.
При токах более 1000 А прибегают к другим типам механизмов свободного расцепления [3.3].
Необходимо отметить, что при отключении КЗ скорость перемещения подвижных частей может возрасти из за действия электродинамических сил. В конечном положении хода происходит удар подвижных частей о неподвижную опору и отброс контактов в направлении «включено». Отброс контактов может привести к новому замыканию цепи, в связи с чем устанавливаются демпферы отключения. Иногда подвижная часть в положении «отключено» сажается на специальную защелку. Расцепление защелки происходит при повороте рукоятки в направлении «готов к включению».