11.4. УПРАВЛЕНИЕ ГЕРКОНОМ С ПОМОЩЬЮ ПОСТОЯННОГО МАГНИТА
Управлять состоянием геркона можно с помощью не только магнитного поля, создаваемого катушкой управления, но и поля постоянного магнита. Такой способ широко используется в современных слаботочных аппаратах управления (тумблеры, переключатели, кнопки, командоаппараты) и контрольно-измерительной аппаратуре (сигнализаторы положения, конечные выключатели, датчики). Состояние геркона изменяется при приближении или удалении от него постоянного магнита. При приближении постоянного магнита на расстояние Xi (см. рис. 11.6) его магнитный поток начинает замыкаться по КС Под воздействием усилия, созданного этим потоком, КС сблизятся и зазор между ними уменьшится от бн до 6i (точка А).
При дальнейшем уменьшении х усилие, создаваемое постоянным магнитом, увеличится и характеристика Рэ поднимется. При х-2=хср КС замыкаются. Для обеспечения запаса по усилию координата х% берется меньше х% Минимальное контактное нажатие при х2—хср равно РК]Н.
Отпускание геркона происходит при увеличении координаты х до значения хл=хотп.
Постоянный магнит может подходить к геркону так, что его ось намагничивания будет параллельна оси МК. В этом случае геркон реагирует на тангенциальную составляющую индукции Вт поля постоянного магнита (рис. 11.13, а). Изменение Вх при перемещении магнита показано на том же рисунке. Срабатывание геркона наступает в точках Вх =/5ср. Таким образом, при движении магнита в направлении, указанном стрелкой, возможно трехкратное срабатывание (точки СР\—СР3) и отпускание (точки ОТТ1\—ОТП?). Первое срабатывание происходит в точке СР3.
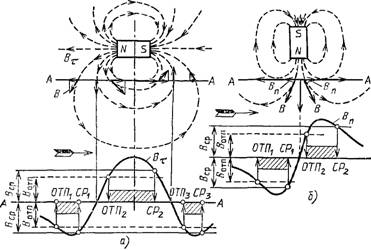
Рис. 11.13. Влияние тангенциальной (а) и нормальной (б) составляющих магнитного поля магнита на работу геркона
Если ось намагничивания магнита перпендикулярна оси "МК (рис. 11.13,6), то при движении магнита в указанном стрелкой направлении происходит двукратное срабатывание геркона, который реагирует на нормальную составляющую Вп напряженности поля.
Для устройств, управляемых постоянным магнитом, основными параметрами являются:
а) координата срабатывания уср, определяющая расстояние между магнитом и герконом в момент срабатывания;
Рис. 1114. Дифференциал хода d и зона включенного состояния Д(/ геркона
б) координата отпускания у0т, определяющая расстояние между магнитом и герконом при отпускании;
в) дифференциал хода d, представляющий собой разность координат d=yorn—уср;
г) зона включенного состояния Ау, составляющая Ау = = г/отп-г-г/ср=2г/сР+й!.
Перечисленные выше характеристики поясняются рис.
11.14. В точке А геркон 1 срабатывает, а в точке Б — отпускает при реверсивном перемещении управляющего элемента— постоянного магнита N (рис. 11.14, а) и при oicyr-ствии реверса (рис. 11.4,6). Величины d и Ау в большинстве случаев должны быть минимальны, так как большая величина d увеличивает зону нечувствительности контрольно-измерительной аппаратуры. При большом количестве герконов они могут быть установлены по окружности (рис.
11.15, а). Постоянный магнит / укреплен на вращающемся рычаге и поочередно замыкает герконы 3, 2, 4. Для уменьшения зоны включенного состояния Лаг герконы помещены в магнитные экраны 5. Влияние толщины экрана на работу геркона показано на рис. 11.15, б.
Следует отметить, что при наличии постоянного магнита управление герконом может производиться за счет перемещения ферромагнитного экрана (рис. 11.16).
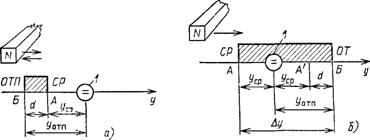
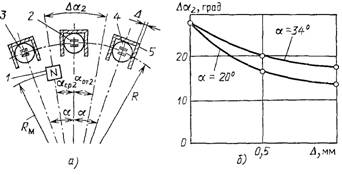
Рис. 11.15. Работа герконов в многоконтактных переключателях:
а — расположение герконов и постоянного магнита; б — зависимость зоны включенного состояния (угла Да2) от толщины экрана А
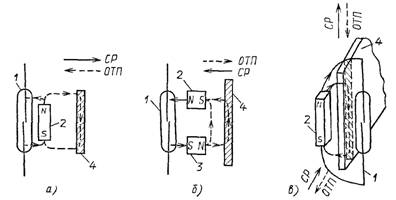
Рис. 11.16. Управление герконом с помощью ферромагнитного экрана:
а — геркон / срабатывает при удалении экрана 4 от постоянного магнита 2; б — геркон / срабатывает при приближении к постоянным магнитам 2 и 3 экрана 4; в — геркон / срабатывает при удалении экрана 4 из зазора между герконом и постоянным магнитом 2