Широке розповсюдження для обрізання сучків в лісовій промисловості отримали електросучкорізи. Розроблено багато конструкцій електросучкорізів, які відрізняються лише окремими деталями і деякими технічними показниками.
Сучкорізи містять: електричний двигун підвищеної частоти (200 Гц) з зовнішнім обдувом; пиляльну головку з пиляльним апаратом; штангу, в яку вмонтований вал; кабель зі з’єднувальною муфтою; рукоятку і вимикач. Існує декілька типів сучкорізів. Так в сучкорізах типу РЕС для пиляння застосовується пиляльний венець, а для керування - двополюсний напівавтоматичний повзунковий вимикач. Для сучкорізів типу “північ” для пиляння використовують пиляльний диск і для керування - двополюсний барабанний вимикач. В таблиці 2.2 подані технічні дані деяких типів сучкорізів.
Останнім часом створюються стаціонарні сучкорізи і машини, які дозволяють зробити новий крок до механізації робіт з обрізання сучків. Стаціонарні сучкорізні машини мають два конструктивних типи: роторні і статорні.
Таблиця 2.2 - Основні технічні дані електросучкорізів
Технічна і енергетична характеристика | РЕС-1 | РЕС-2 | РЕС-4 | Північ-2 | Північ-3 |
1 | 2 | 3 | 4 | 5 | 6 |
Номінальна потужність двигуна при | 1,4 | 1,7 | 1,0 | 1,0 | 1,0 |
Швидкість зрізання, м/с | 23 | 23 | 20 | 34 | 36,5 |
Максимальний діаметр сучків, що зрізаються, | 120 | 120 | 86 | 75 | 75 |
мм |
|
|
|
|
|
Ширина пропили, мм | 8,5 | 8,5 | 7,5 | 2,7 | 2,7 |
Продуктивність чистого пиляння, см2/с | 50 | 60 | 40 | 50 | 50 |
Вага інструмента без кабеля і муфти, кг | 7,2 | 7,0 | 4,5 | 5,4 | 5,7 |
Роторні сучкорізні машини мають ріжучий орган, що встановлений на роторі, який обертається за допомогою двигуна електропривода. Ротор в середині має отвір, рівний максимальному діаметру деревини. На рисунку 2.2 подана кінематична схема сучкорізного верстата роторного типу. Вона складається з механізму обрізання сучків, переднього і заднього механізмів подачі. Механізм обрізання сучків мас ротор 1 з центральним прохідним отвором для стовбурів деревини, три різцетримача 2 з важелями саморозводу 3. Ротор встановлений на спеціальному кульковому підшипнику 5 і приводиться в рух за допомогою електродвигуна 4 через пасову передачу. Швидкість електродвигуна становить 500 об/хв.
Передній і задній механізми подачі є механізми гусеничного типу. Вони складаються з двох гусениць 6 і 7, кожна з яких огинає по чотири зірочки, що розташовані в кутах шарнірних паралелограмів. Обидва паралелограми переднього і заднього механізмів подачі пов’язані між собою за допомогою зубчастих секторів 8, які забезпечують суворо однакове пересування гусениць відносно поздовжньої осі подачі, що дає змогу досягнути центрування стовбура будь якого діаметра. До поверхні стовбура гусиниці притискуються пружинами 9 з зусиллям 20-30 кН. Передній і задній механізми мають окремі приводи з електродвигунами 10, редукторами 11 і ланцюговими передачами 12.
Сучкорізна машина роторного типу працює так: передній механізм подачі пересуває деревину комлем вперед на робочі органи машини, одночасно обломуючи частину сучків. Решта притискуються до стовбуру деревини. Камель деревини натискує на важелі саморозводу, вони заходять на поверхню стовбура, розводять різцетримачі і різці, що обертаються, зрізають сучки з стовбура, який пересувається. Різці на передньому боці ротора здійснюють початкове обрізання сучків. Задня група різців зачищає стовбур. Різцетримачі притискуються до стовбуру гумовими натяжними кільцями. Задній механізм подачі витаскує стовбур з роторної головки, тобто з ротора.
Режим роботи електродвигунів механізму подачі сучко різної машини роторного типу є тривалий, а механізму різання повторно-короткочасний. Це треба врахувати при виборі потужності електродвигунів цих механізмів. На рисунку 2.3 подано графік залежності потужності різання РР від діаметра стовбура D для різних видів деревини, а на рисунку 2.4 - залежність питомого розходу електроенергії W на зрізання від об’ему хлиста Q для сучкорізної машини роторного типу.

Рисунок 2.3 - Графіки залежності потужності різання від діаметру стовбура
Сучкорізні машини роторного типу застосовують також для окорки стовбурів, але при цьому різці заміняють на корознимачі або додають до ротора вузол окорки.
Розглянемо принцип дії і режими роботи сучкорізних машин статорного типу, їх застосовують в напівавтоматичних лініях типу ПСЛ. Ця лінія містить розтаскувач дерев, гідравлічний маніпулятор, сучкорізну машину, протаскуючий транспортер з двома напівавтоматичними ексцентриковими захватами і виштовхувач сучків.
Сучкорізна машина, що входить в склад напівавтоматичної лінії типу ПСЛ-І (рис 2.5), містить статичні ножі 1 для попереднього обрізання сучків (рис 2.5 а) і шість фрезерних головок для зачистки сучків. Фрезерна головка (рис 2.6 б) складається в конусної трирізцевій фрези З, корпусу 4, копира 5, електродвигуна 6, маховика 7 і шпинделя 8.

Рисунок 2.4 - Графіки залежності питомого розходу електроенергії на різання від об’єму хлиста
Фрезерна головка притискується до стовбура за допомогою гідро двигуна 9. Статичні ножі силового різання притискуються до стовбуру гідравлічними циліндрами, забезпечуючи центрування стовбура відносно осі сучко різної машини. Подача деревини здійснюється за допомогою дволанцюгового транспортера з затискачем комля деревини гідравлічними ексцентриковими захватами. По закінченню протискування деревини через сучко різну машину автоматичний ексцентриковий захват розкривається і оброблений стовбур скидається на приймальний майданчик розкряжувального агрегату.
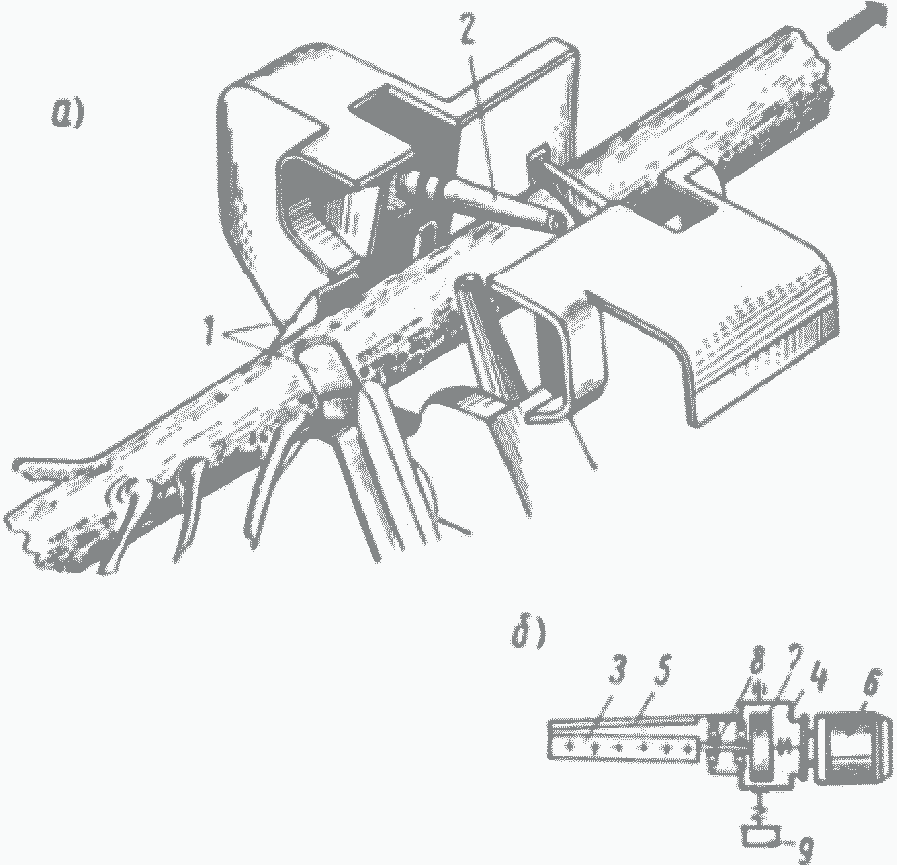
Рисунок 2.5 — Сучкорізна машина напівавтоматичної лінії ПСЛ-1
а - механізм різання;
б - ріжуча фрезерна головка
Після цього гідравлічний маніпулятор подає в сучкорізну машину наступну деревину.
Аналіз режимів роботи електрообладнання напівавтоматичної лінії типу ПСЛ показує, що режими роботи її механізмів і машин різний. Наприклад, протаскуючий транспортер працює у повторно-короткочасному режимі, тому для його
електроприводу потрібний електричний двигун, що працює в режимі S3.
Так як під час зрізання сучків режим роботи фрезерної головки має піковий характер, то найбільш ефективним для неї буде електропривід з маховиком. Наявність маховика дозволяє зробити вирівнювання навантаження і вибрати потужність електродвигуна значно меншою. Пояснюється це тим, що під час пікового навантаження (зрізання сучків) маховик віддає накопичену енергію, при цьому момент, створений електродвигуном, зростає за законом експоненти по мірі зниження швидкості двигуна. Потім під час паузи маховик відбирає енергію від двигуна, при цьому момент двигуна знижується по мірі розгону маховика також за законом експоненти. Отже знижуються максимальні значення піків навантаження, що повинен подолати електродвигун і здійснюється "вирівнювання" навантаження. Важливим є правильний вибір махового моменту (GD2 махов) маховика.