Разрабатываем структурную схему, которая изображена на рисунке 6.1 и выполняем синтез регуляторов методом СПР /7/.
Желаемая передаточная функция разомкнутого контурного тока:
| (6.1) |
где ![]() - соотношение постоянной времени контура, принимаем для обеспечения желаемого переходного процесса с перерегулированием не более 3,4%
- соотношение постоянной времени контура, принимаем для обеспечения желаемого переходного процесса с перерегулированием не более 3,4% ![]() ;
;
![]() - некомпенсируемая постоянная времени. Принимаем
- некомпенсируемая постоянная времени. Принимаем ![]() ,
,
где ![]() - постоянная времени фильтра в схеме широтно-импульсного регулятора.
- постоянная времени фильтра в схеме широтно-импульсного регулятора.
Передаточная функция объекта регулирования:
| (6.2) |

где ![]() - электромагнитная постоянная роторной цепи двигателя;
- электромагнитная постоянная роторной цепи двигателя;
![]() - индуктивность цепи ротора, Гн;
- индуктивность цепи ротора, Гн;
![]() - эквивалентное активное сопротивление цепи ротора, Ом;
- эквивалентное активное сопротивление цепи ротора, Ом;
![]() - передаточная функция широтно-импульсного регулятора;
- передаточная функция широтно-импульсного регулятора;
![]()
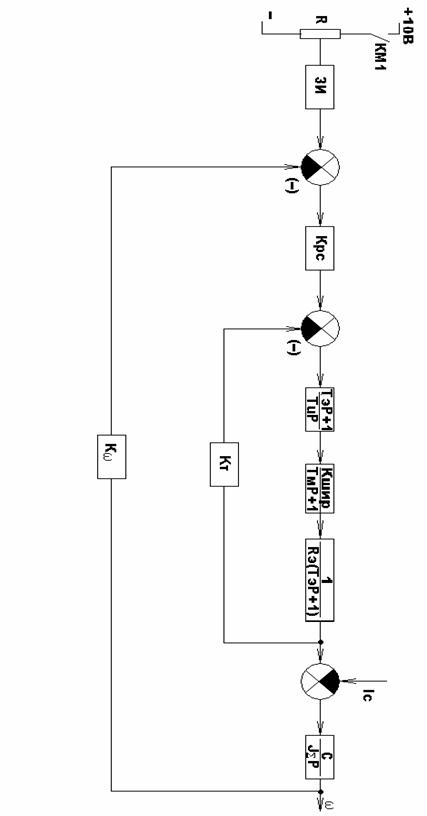
Рисунок 6.1 – Структурная схема подчинённого регулирования
![]() - приращение напряжения на входе регулятора тока;
- приращение напряжения на входе регулятора тока;
![]() - приращение выпрямленного тока в цепи ротора;
- приращение выпрямленного тока в цепи ротора;
![]() ,
,
![]() - выпрямленное напряжение ротора, В;
- выпрямленное напряжение ротора, В;
![]() - напряжение управления, В.
- напряжение управления, В.
Получаем передаточную функцию регулятора тока:
 | (6.3) |
где ![]() - постоянная интегрирования.
- постоянная интегрирования.
Передаточная функция замкнутого контура тока:
 | (6.4) |
Объект регулирования скорости состоит из замкнутого контура регулирования тока и механического звена электропривода и имеет следующую передаточную функцию:
(6.5) |
где ![]() - коэффициент пропорциональности, рассчитываем для скольжений
- коэффициент пропорциональности, рассчитываем для скольжений ![]() и
и ![]()
(6.6) |
где  ;
;
![]() ;
;
![]() ;
;
![]() ;
;
отсюда  ,
,
следовательно:
(6.7) |
где ![]() - ток ротора, А;
- ток ротора, А;
![]() - активное сопротивление фазы ротора, Ом.
- активное сопротивление фазы ротора, Ом.
![]() - коэффициент обратной связи по скорости;
- коэффициент обратной связи по скорости;
![]() - приращение напряжения на выходе регулятора скорости;
- приращение напряжения на выходе регулятора скорости;
![]() - приращение угловой скорости асинхронного двигателя.
- приращение угловой скорости асинхронного двигателя.
Желаемая передаточная функция разомкнутого контура скорости:
(6.8) |
Принимаем ![]()
Получаем передаточную функцию регулятора скорости:
 | (6.9) |
где ![]() - коэффициент регулятора скорости, рассчитываем для
- коэффициент регулятора скорости, рассчитываем для ![]() и
и ![]() .
.
- Определение коэффициентов
![]() с;
с;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;

Принимаем для реализации значение ![]()
- Моделирование системы регулирования угловой скорости и получение графиков переходных процессов.
Моделирование удобно вести с использованием программы «Compas 6», так как она позволяет рассчитать переходные процессы, непосредственно по структурной схеме подчинённого регулирования рисунок 7.1.
Результаты моделирования представлены в виде графиков переходных процессов на рисунках 7.2, 7.3 и 7.4.
Рисунок 7.1 – Схема электрическая структурная